
Пояснюємо польотний контролер: розуміння систем керування дронами
12.04.2024
Польотний контролер - один з найважливіших компонентів FPV-дрона. Він відповідає за стабілізацію дрона, забезпечення точних маневрів і надання даних пілоту. У цій статті ми детально пояснимо, що таке польотний контролер, як він працює і чому це така важлива частина будь-якого дрона. Незалежно від того, новачок ви чи досвідчений пілот, розуміння основ роботи контролерів польоту має вирішальне значення для отримання максимального задоволення від польотів.
Польотний контролер: що це таке і як він працює
Контролер польоту, або "FC", - це як мозок FPV-дрона. Це плата, оснащена датчиками, які визначають рухи дрона та команди користувача. Маючи цю інформацію, він регулює швидкість двигунів, щоб перемістити дрон у потрібному напрямку.
Всі польотні контролери мають основні датчики, такі як гіроскопи (gyro) і акселерометри (acc), в той час як інші можуть включати інші датчики, такі як датчики барометричного тиску (барометр) і компаси (магнітометр).
FC також може слугувати хабом для інших периферійних пристроїв дрона, таких як ESC, GPS, світлодіоди, сервоприводи, радіоприймач, FPV-камера та VTX.
З розвитком технологій контролери польоту стають меншими, більш функціональними і використовують кращі процесори та апаратне забезпечення.
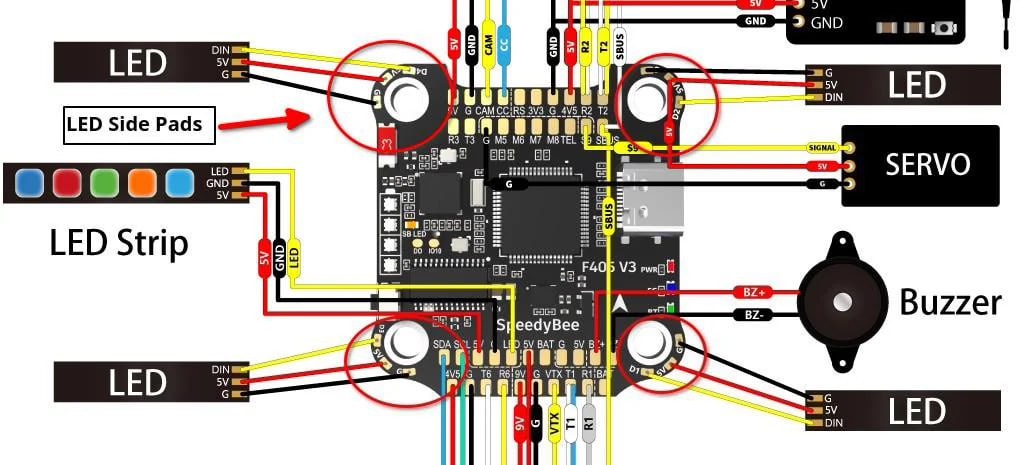
Підключення до контролера польоту
Ось приклад електричної схеми підключення компонентів FPV-дрона до контролера польоту.
Прошивка контролера польоту
Коли справа доходить до контролерів польоту, у вас є вибір не тільки апаратного забезпечення, але й прошивки. Різні варіанти прошивок пропонують різні функції та спеціалізації для різних застосувань. Наприклад, iNav розроблений з урахуванням використання GPS, в той час як Betaflight більше орієнтований на польотні характеристики.
Ось список популярних варіантів прошивок FC для FPV дронів:
Betaflight: Ця прошивка з відкритим вихідним кодом має найбільшу базу користувачів, що дозволяє легко отримати допомогу в разі виникнення проблем. Він також має найширший спектр доступних польотних контролерів.
KISS: Це прошивка з закритим вихідним кодом, апаратне забезпечення та прошивка контролюються приватною компанією. Це означає, що ви обмежені у використанні їхніх власних контролерів польоту.
iNav: Якщо ви більше зацікавлені в автоматизованому польоті та GPS-навігації, то iNav - це те, що вам потрібно.
Після того, як ви вибрали прошивку, ви можете шукати сумісний польотний контролер.

Конфігурація та налаштування
Прошивку польотного контролера можна налаштувати за допомогою комп'ютера, смартфона або апаратури. Кожна прошивка має власний інтерфейс користувача (UI) і параметри, які можна змінювати. Однак навіть схожі на вигляд інтерфейси можуть давати різні льотні характеристики залежно від прошивки, тому потрібен час, щоб вивчити і пристосуватися до нової прошивки.
"Tuning" - це термін, який ми використовуємо, щоб описати процес налаштування параметрів, таких як PID, швидкості RC та інших, для досягнення бажаних льотних характеристик. Це важливий крок в оптимізації продуктивності вашого FPV-дрона і отриманні максимальної віддачі від вашого польотного контролера.

Процесор
Польотний контролер використовує мікроконтролери (MCU) для зберігання кодів прошивки та виконання складних обчислень.
Існує кілька типів мікроконтролерів, які використовуються в FC, зокрема F1, F3, F4, F7 і H7. Основні відмінності між ними полягають у швидкості обчислень та обсязі пам'яті.

F4, F7 і H7 - чудові процесори, в той час як F1 і F3 більше не підтримуються в останніх версіях Betaflight через недостатню кількість пам'яті для розширення прошивки.

Що таке UART в польотному контролері?
UART, або універсальний асинхронний приймач/передавач, - це апаратний послідовний інтерфейс, який дозволяє підключати зовнішні пристрої до польотного контролера. Приклади включають радіоприймачі, телеметрію, GPS та управління VTX.
Кожен UART має два виводи: один для передачі даних (TX) і один для прийому даних (RX). Важливо пам'ятати, що TX на периферійному пристрої з'єднується з RX на FC, і навпаки.
У наведеному нижче прикладі UART3 (контакти R3 і T3) і UART6 (контакти R6 і T6) на польотному контролері можуть бути призначені для різних завдань у вкладці портів конфігуратора Betaflight.
Розуміння UART і його контактів має вирішальне значення для налаштування вашого FPV-дрона для різних сценаріїв .
Контролери польоту можуть мати різну кількість UART, тому перед покупкою переконайтеся, що їх достатньо для вашої збірки.
Якщо вам потрібно більше портів UART, Betaflight має функцію під назвою SoftSerial, яка дозволяє створити до двох додаткових портів UART за допомогою програмного забезпечення. Майте на увазі, що SoftSerial збільшує навантаження на процесор, він не підходить для повільних процесорів, і вам, можливо, доведеться знизити частоту PID-Loop. Крім того, SoftSerial має набагато нижчу частоту оновлення, що означає, що він не підходить для критично важливих модулей, таких як приймач сигналу і GPS.

Інвертування UART
Вам потрібно знати про інвертування UART, якщо ви використовуєте приймачі Frsky, оскільки їхні вихідні сигнали є інвертованими.
F3, F7 і H7 можуть обробляти інвертовані сигнали без додаткового обладнання, проте F1 і F4 потребують зовнішнього інвертора для правильного зчитування сигналу. Щоб обійти цю проблему, деякі польотні контролери F4 мають спеціальний порт для підключення до системної шини (позначені SBUS). Крім того, ви можете отримати неінвертований сигнал від приймача.
Гіроскоп
Завданням датчика IMU є вимірювання руху та орієнтації квадрокоптера. Датчик IMU містить акселерометр (ACC) і гіроскоп (Gyro).
Контролер польоту (FC) на дроні використовує ряд датчиків для визначення руху та орієнтації. Основний датчик, який використовується для цієї мети, називається інерційний блок вимірювання (IMU). IMU містить як акселерометр, так і гіроскоп.
Гіроскоп використовується для вимірювання кутової швидкості, тоді як акселерометр вимірює лінійне прискорення. Найпопулярніший режим польоту в Betaflight, Acro Mode, використовує лише гіроскоп, тоді як багато інших режимів польоту, таких як Angle Mode, Horizon Mode і Rescue Mode, вимагають для роботи як гіроскоп, так і акселерометр.
Типи IMU
Найпопулярніші типи гіроскопів для FPV виготовляються двома виробниками: InvenSense (тепер частина TDK) і Bosch Sensortec. Ось список найпоширеніших моделей гіроскопів, а також протоколи зв'язку, які вони підтримують, і їхня максимальна ефективна частота дискретизації:

MPU9150 - це фактично MPU6050 з вбудованим магнітометром AK8975, а MPU9250 - це MPU6500 з тим же магнітометром
Щоб дізнатися, який гіроскоп стоїть у вашому FC, ви можете знайти номер моделі IMU, надрукований на мікросхемі.

Або ви можете ввести команду "status" в Betaflight Configurator CLI і знайти назву IMU в розділі Gyro/ACC. Деякі FC можуть мати більше одного гіроскопа на борту, і ви можете вибрати, який з них використовувати в CLI за допомогою команди "set gyro_to_use=0 або 1".

Як вибрати гіроскоп
Вибір гіроскопа залежить від його максимальної частоти дискретизації та чутливості до електричних і механічних перешкод.
До 2022 року найпоширенішим гіроскопом був MPU6000 через його стійкість до шумів.
Загальний консенсус полягає в тому, щоб уникати MPU6500 і MPU9250, незважаючи на їхню вищу швидкість дискретизації.
ICM20689 також є непоганим гіроскопом з точки зору продуктивності, але має вищий рівень збоїв. ICM20602 - ще один популярний вибір, однак він більш чутливий до шумів і його важче налаштовувати. Починаючи з Betaflight 4.1 (жовтень 2019), частота дискретизації гіроскопа 32 КГц була вилучена з Betaflight, тому використання гіроскопа з частотою дискретизації 32 КГц не має ніяких переваг.
Гіроскоп BMI270
У 2022 році виробники FC перейшли від MPU6000 до BMI270 через вартість та доступність. Хоча його максимальна частота дискретизації становить лише 6,4 КГц, Betaflight змушує його переходити в режим OSR4 (з частотою зрізу 300 Гц), що призводить до ще нижчої частоти дискретизації - 3,2 КГц. Основним недоліком гіроскопа BMI270 є, ймовірно, додаткова фільтрація, яка іноді потрібна, оскільки частота відсікання вища у вбудованому фільтрі низьких частот гіроскопа BMI270.
Гіроскоп ICM42688P
У 2023 році все більше виробників знову переходять з BMI270 на ICM42688P через доступність і вартість. До гіроскопа ICM-42688P було чимало питань з приводу проблем із шумом і налаштуванням. Однак дослідження показують, що проблема не в самому гіроскопі, а в конструкції контролерів польоту, в які він інтегрований. Зокрема, для оптимальної роботи гіроскопа потрібне чисте джерело живлення, що було проігноровано в деяких ранніх FC у 2022 і на початку 2023 року, що призвело до низької продуктивності. Для користувачів, які розглядають можливість придбання польотного контролера з цим гіроскопом, дуже важливо ретельно вивчити огляди продуктів, зосередившись на характеристиках шуму.
Gyro BUS
Існує два типи зв'язку між гіроскопом і процесором:
SPI
i2c
SPI є кращим протоколом зв'язку між IMU і процесором, оскільки він забезпечує набагато вищу частоту оновлення гіроскопа, ніж I2C (який має обмеження в 4 КГц). Майже всі сучасні FC сьогодні використовують SPI-з'єднання для гіроскопа.
MPU6050 і 9150 підтримують тільки i2c, а не SPI.
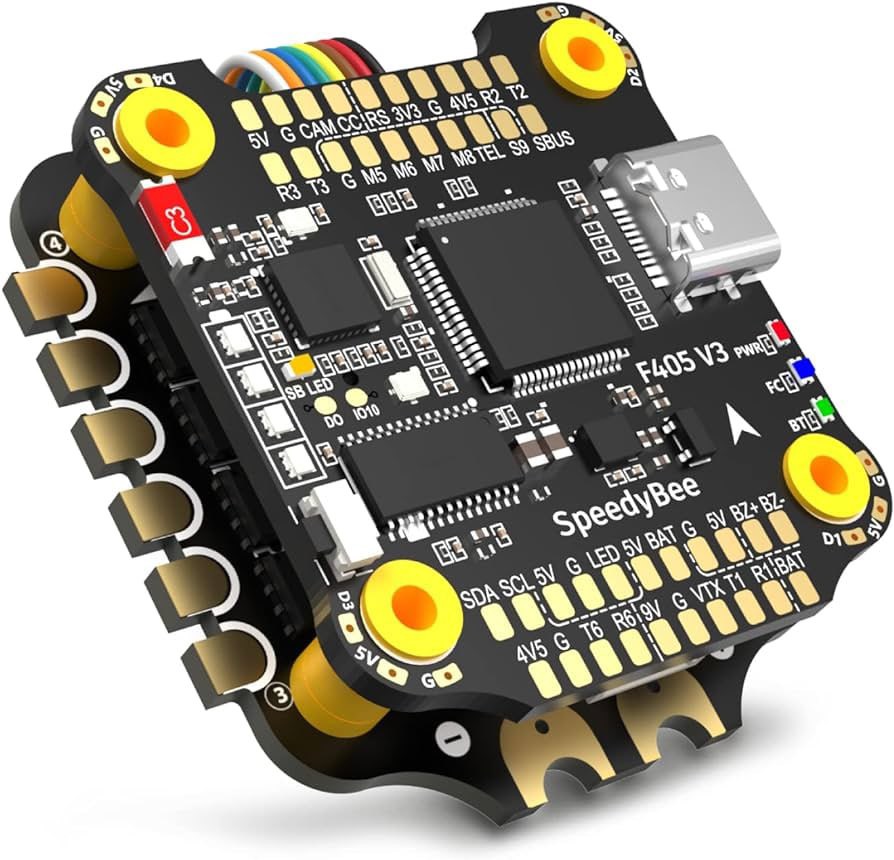
Компонування
Схема FC - це розташування контактів і паяльних майданчиків на платі контролера польоту, яке може суттєво вплинути на зручність підключення різних компонентів.
Багатьох людей цікавлять лише можливості контролера польоту, і вони можуть не звертати уваги на важливість розводки.
Незважаючи на його важливість, багато людей схильні зосереджуватися виключно на можливостях польотного контролера, не звертаючи уваги на компонування. Наприклад, CLRacing F7 і Kakute F7 - чудові контролери, але, CLRacing F7 має кращу компоновку: всі піни для пайки згруповані за призначенням і розташовані по всіх краях.
Особисті вподобання можуть відрізнятися, але розташування місць під пайку є важливим фактором при виборі польотного контролера.


Сумісність ESC
Сьогодні ESC 4в1 часто продаються разом з польотними контролерами у вигляді стека, і вони розроблені за принципом "plug and play".

Однак для ESC і FC різних брендів роз'єми і з'єднання між цими платами можуть бути несумісними, тому важливо перевірити перед підключенням, інакше ваш FC може підгоріти.
Якщо ви хочете використовувати окремі ESC (індивідуальні ESC, встановлені на лучах), ми рекомендуємо використовувати AIO (All in one). Це FC з інтегрованим PDB (плата розподілу живлення). Але це забута технологія, останній час використовуюсь саме 4в1 ESC. Насправді, в наш час стає все важче знайти окремий ESC на один канал.

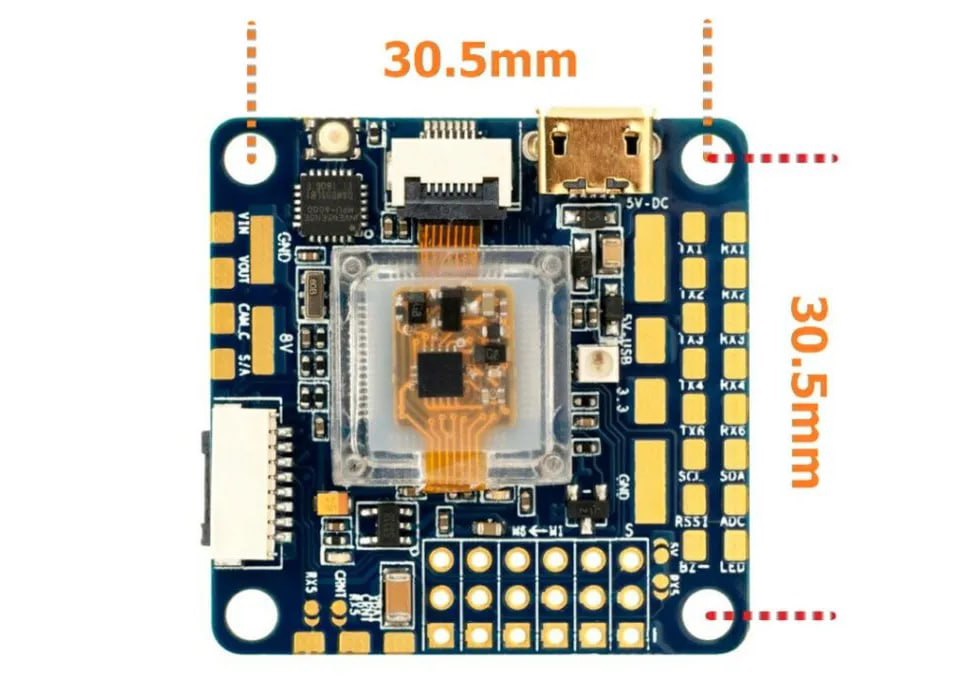
Кріплення
Кріплення позначають відстанню між сусідніми монтажними отворами на контролері польоту. Найпоширеніші: 30,5×30,5 мм, 25,5×25,5 мм, 20×20 мм і 16×16 мм.Кріплення здебільшого визначається розміром плати та літального апарату, для якого вона призначена. Для дронів розміром більше 5 дюймів часто використовується 30,5×30,5 мм, тоді як для менших дронів зазвичай використовують 25,5×25,5 мм і 20×20 мм
Інші функції
Польотні контролери мають низку функцій, які можуть покращити ваш досвід польотів. Давайте розглянемо деякі з них.
Black box (Чорний ящик)
Blackbox корисний для налаштування та усунення несправностей. Ви можете записувати дані польоту двома способами - за допомогою вбудованої флеш-пам'яті або зберігати їх на SD-карті, якщо є бортовий логгер SD-карти
Флеш-пам'ять дешевша, але має обмежену ємність, зазвичай від 5 до 10 хвилин польотних даних. Завантаження даних з неї також може бути повільним. Використовуючи зчитувач SD-карт на вашому польотному контролері, ви можете вести записи протягом усього року, не спустошуючи пам'ять, і це дає вам доступ до журналів миттєво, просто вставивши SD-карту в адаптер.
Бортовий журнал - обов'язкова річ для досвідчених пілотів. Вона дає вам можливість взяти максимальну продуктивність і і детально діагностувати проблеми. Якщо у вашому польотному контролері немає слота для SD-карти або флеш-пам'яті, ви також можете підключити зовнішній адаптер SD-карт до FC через UART.
Типи роз'ємів
Два основні типи роз'ємів на польотному контролері:
пластикові роз'єми JST
точки для пайки
Пластикові роз'єми менш міцні, але зручні у використанні, в той час як точки пайки більш надійні, але вимагають пайки.
BEC
BEC (battery eliminator circuit) - це те, що ми називаємо регулятором напруги на польотному контролері.
Майже всі польотні контролери мають 5В BEC для живлення радіоприймача, GPS і т.д., в той час як деякі також пропонують 9В або 12В BEC, призначені для живлення відеопередавача. Хоча ви можете живити обладнання безпосередньо від акумулятора, живлення від стабілізованого джерела живлення буде кращим.
Важливо вибрати правильне джерело живлення залежно від пристрою, який ви живите. Деякі пристрої можна живити безпосередньо від LiPo батареї, наприклад, відеопередавач. Однак зазвичай живлення напряму від акумулятора веде до шуму, стрибки напруги можуть навіть пошкодити ваші модулі, якщо немає достатньої фільтрації. BEC діє як фільтр живлення і зазвичай є кращим джерелом живлення, але вам потрібно перевірити, чи відповідає він вимогам напруги та струму вашого пристрою.
Барометр
Наявність барометра, вбудованого у ваш польотний контролер, може зробити політ за допомогою GPS точнішим (наприклад, у режимі GPS Rescue Mode), але він не є обов'язковим. І також показати висоту на яку ви піднялись під час польоту.
OSD
Для аналогових систем передачі звʼязку переконайтеся, що ваш польотний контролер має чіп OSD (AT7456E), інакше Betaflight OSD не працюватиме. Однак він не потрібен для цифрових FPV-систем, таких як DJI, HDZero і Avatar. Все, що їм потрібно для роботи екранного меню - це просто запасний UART .
М'яке кріплення
М'яке кріплення контролера польоту має важливе значення для оптимальної роботи, воно зменшує шум/вібрацію від рами до гіроскопа.
Майже всі сучасні FC мають отвори M4, які дозволяють вставляти гумові демпіери, щоб ви могли використовувати кріплення M3 для закріплення плати в рамі.

****