
Налаштування Betaflight для першого польоту FPV-дрона
30.03.2024
Вступ
Цей посібник допоможе вам встановити прошивку Betaflight і налаштувати контролер польоту для вашого першого польоту після побудови FPV-дрона. Існує багато параметрів, які можна ввімкнути або змінити, і, ймовірно, знадобляться години, щоб пояснити, що вони всі роблять. Тому в цій статті ми розглянемо лише основні налаштування, які вам потрібно знати для першого зльоту.
Betaflight – це чудова програма з відкритим вихідним кодом, розроблена спеціально для FPV-дронів (багатороторів загалом).
Початок роботи
Цей посібник базується на версії Betaflight 4.4. Він підходить вам, лише якщо ваш дрон відповідає наступним критеріям:
Це квадрокоптер (4 двигуни)
Ваш контролер польоту сумісний з Betaflight
Ви використовуєте послідовний радіоприймач (наприклад, Crossfire, ExpressLRS, Tracer, Ghost тощо)
Ваш ESC – BLHeli_S або BLHeli_32
Перш ніж ми почнемо:
Зніміть усі пропелери для безпеки.
Переконайтеся, що ви підключили антену до VTX (якщо ви вмикаєте VTX без антени, він може перегрітися та пошкодитися).
Встановлення конфігуратора Betaflight
Конфігуратор Betaflight – це програмне забезпечення, яке нам потрібно використовувати для прошивки контролера польоту та налаштування Betaflight.
Завантажте та встановіть останню версію конфігуратора Betaflight:
https://github.com/betaflight/betaflight-configurator
Файли інсталяції доступні для цих ОС:

Перейдіть до Параметри на лівій панелі та ввімкніть ці параметри:

Показати попередження про підключення (Show connection warnings)
Завантажити образ прошивки разом із прошивкою (Download firmware image with firmware)
Оновлення прошивки
Якщо ви придбали контролер польоту (FC) відповідно до наших рекомендацій, він, ймовірно, вже буде поставлятися з попередньо встановленим Betaflight. Однак це може бути стара версія, тому завжди корисно оновлюватися до найновішої версії Betaflight для виправлення помилок і нових функцій, хоча це не обов’язково.

Перш ніж прошивати контролер польоту, обов’язково створіть резервну копію наявних налаштувань, що дозволить вам повернутися до початкового стану, якщо щось піде не так (це трапляється дуже рідко, але краще перестрахуватися)
Порада: перш ніж оновлювати прошивку FC, вам слід регулярно перевіряти та оновлювати конфігуратор Betaflight для нових функцій та виправлення помилок. Застарілий конфігуратор може бути несумісний із новою прошивкою.
Вперше налаштовуємо Betaflight
Для спрощення ми налаштуємо лише основні параметри, достатні для того, щоб підняти вас у повітря. Пізніше, за бажанням, ви можете дослідити інші налаштування.
Важливо! Обов’язково зніміть усі пропелери перед налаштуванням квадрокоптера на стенді, щоб уникнути нещасних випадків.
Підключення FC до комп’ютера:
Підключення USB-кабелю до FC також забезпечить живлення, немає необхідності підключати LiPo-акумулятор.

Після підключення FC до комп’ютера в конфігураторі має з’явитися новий COM-порт. Виберіть цей новий COM-порт і натисніть Підключити (Connect). Зверніть увагу, що в прикладі у мене є COM11, але у вашому випадку він, ймовірно, буде іншим. І часто COM-порт змінюється на іншому контролері польоту/комп’ютері.

Якщо ви не знайшли COM-порт або виникли проблеми з підключенням, це може бути пов’язано з проблемою драйвера комп’ютера. бо ваш FC може бути “пошкоджений” (дуже рідко)
Порада: переконайтеся, що ви використовуєте USB-кабель для передачі даних. Існує два типи USB-кабелів: кабелі лише для зарядки та кабелі для передачі даних. Вам потрібно використовувати кабель для передачі даних для зв’язку з конфігуратором Betaflight.
Налаштування
Після успішного підключення до Betaflight вас зустріне вкладка Налаштування (Setup) з 3D-моделлю квадрокоптера. Тут ви отримуєте базовий огляд стану контролера польоту та доступ до кількох основних функцій.

Ось кілька речей, які вам потрібно зробити тут:
- Поставте квадрокоптер/FC на рівну поверхню, потім натисніть Калібрувати акселерометр (Calibrate Accelerometer) – це потрібно зробити лише один раз після прошивки.
- Тепер рухайте квадрокоптером руками (спробуйте нахилити вперед і назад, перекинути вліво і вправо, обертати тощо), 3D-модель повинна слідувати за рухами.
Якщо 3D-модель не рухається так само, як ваш квадрокоптер, це може означати кілька речей: можливо, ваш FC перевернутий догори дном або встановлений неправильно (наприклад, стрілка на FC не вказує вперед). Спробуйте обертати плату, доки вона не стане правильною. Якщо ви не можете фізично обертати FC, ви можете спробувати встановити зміщення YAW на вкладці конфігурації, вирівнювання датчиків плати (зазвичай 90/180/270 градусів), щоб виправити це.
Пресети
Перш ніж вносити будь-які зміни, завжди корисно спочатку створити резервну копію ваших поточних налаштувань. Ви можете зробити це на вкладці “Presets”.

Калібрування напруги
Візьміть акумулятор, перевірте його напругу за допомогою тестера або мультиметра.
Потім підключіть його до дрона (спочатку зніміть пропелери!). Якщо напруга, що повідомляється в конфігураторі (коло в червоному на малюнку нижче), не відповідає вашій виміряній напрузі, вам слід відкалібрувати датчик напруги в Betaflight.
Для цього перейдіть на вкладку “Power & Battery” у лівій панелі.

Натисніть кнопку “Calibration” у нижньому правому куті.
Введіть виміряну напругу у спливаючому вікні, потім Натисніть кнопку “Calibrate”.Він запропонує застосувати нову шкалу напруги. Це все.

Порти
На вкладці “Ports” ви можете налаштувати всі периферійні пристрої (зовнішні пристрої), підключені до контролера польоту через UART (TX- та RX-контакти) або програмний послідовний порт. Тут ми хочемо налаштувати підключення приймача та VTX.

Вам потрібно зробити лише 2 речі:
- Якщо ви використовуєте аналоговий VTX і підключили провід SmartAudio або IRC Tramp для керування VTX, вам слід вибрати “VTX (TBS SmartAudio)” або “VTX (IRC Tramp)” у розділі “Peripherals” для UART, до якого ви підключили VTX.
- Якщо ви використовуєте послідовний приймач, наприклад ExpressLRS і Crossfire, вам потрібно ввімкнути “Serial RX” на UART, до якого він підключений.
Якщо ви використовуєте систему HD FPV, наприклад DJI / Avatar / HDZero, є додатковий крок.
Поверніться на вкладку пресетів і застосуйте пресет “OSD for Fpv.wtf, DJI O3, Avatar HD” (просто знайдіть “OSD for DJI”).

Пресет еквівалентний введенню наступних рядків команд у CLI:
set osd_displayport_device = MSP
set vcd_video_system = HD
save
Конфігурація
Вкладка “Configuration” містить основні системні налаштування. Більшість налаштувань можна залишити за замовчуванням, потрібно змінити лише кілька.

1. Конфігурація системи
Частота оновлення гіроскопа (Gyro Update Frequency Rate) – це те, як швидко збираються зразки гіроскопа. Це число залежить від того, який у вас гіроскоп, і зазвичай воно фіксоване, тому не хвилюйтеся про це.
Частота циклу PID (PID Loop Frequency) – також відома як looptime, – це те, як швидко виконується розрахунок PID. Максимальне значення залежить від потужності процесора вашого FC, загалом F4 може працювати до 4 кГц, а F7/H7 – до 8 кГц. Це також залежить від частоти оновлення гіроскопа, якщо у вас гіроскоп BMI270, то максимальна підтримувана частота PID Loop Frequency буде 3,2 кГц навіть для більш швидкого FC F7.
Як правило:
F4, 4 кГц
F7/H7, 4 кГц або 8 кГц
Якщо у вас гіроскоп BMI270, 3,2 кГц незалежно від процесора
Під час зміни looptime та ввімкнення функцій звертайте увагу на “Навантаження CPU” (CPU Load) внизу вікна. Намагайтеся утримувати його нижче 75%, використовуючи більш повільний looptime або вимикаючи функції, які вам не потрібні. Високе навантаження на CPU може призвести до нестабільності контролера польоту. 75% – це безпечна межа, рекомендована розробниками Betaflight.
Я рекомендую залишити акселерометр увімкненим. Ви можете вимкнути його, це звільнить деякі обчислювальні ресурси, але ви не зможете використовувати деякі функції в Betaflight, наприклад, режим Angle та режим Horizon, а 3D-модель на вкладці налаштування також.
Ми рекомендуємо залишити акселерометр увімкненим. Ви можете вимкнути його, це звільнить деякі обчислювальні ресурси, але ви не зможете використовувати деякі функції в Betaflight, наприклад, режим Angle та режим Horizon, а 3D-модель на вкладці налаштування також перестане рухатися.
Ви також можете вимкнути барометр і магнітометр, якщо не використовуєте їх.
2. Налаштування DShot Beacon
Ми рекомендуємо зазвичай вмикати DShot Beacon, це дозволяє перетворити ваші двигуни на бузер. Це корисно, коли у вашого дрона немає бузера, він може допомогти вам знайти дрон після падіння.Вам також потрібно призначити перемикач на радіо для бузера на вкладці “Modes”, яку ми покажемо вам згодом.
3. Кут арма
Встановлення кута на 180 фактично вимикає цю функцію, тому це дозволяє вам запустити квадрокоптер, незалежно від того, в якому положенні знаходиться дрон (навіть догори дном). Це корисно, коли ви застрягаєте в дереві, ви все одно можете запустити квадрокоптер та двигуни і вивести його з гілок. Якщо це значення занадто низьке, ви не зможете його увімкнути. Вимкнення акселерометра також вимкне цю функцію.
Приймач
На вкладці “Receiver” ви можете налаштувати та перевірити, чи правильно працює ваш приймач.

Якщо ви використовуєте послідовний RX (більшість людей зараз використовує).
Два найпопулярніші послідовні приймачі – Crossfire і ExpressLRS.
У цьому випадку вам слід вибрати “Serial (via UART)” у режимі приймача.
У Serial Receiver Provider виберіть відповідний протокол приймача:
TBS Crossfire – CRSF
ExpressLRS – CRSF
Tracer – CRSF
Ghost – IRC GHOST
Spektrum DSM2 – SPEKTRUM1024
Spektrum DSMX – SPEKTRUM2048
FrSky RX – SBUS
Futaba RX – SBUS
FlySky RX – IBUS
Turnigy RX – IBUS
Якщо ви підключаєте RX до FC через PPM, використовуйте “PPM RX Input” у режимі приймача.
Якщо ви використовуєте телеметрію, переконайтеся, що ввімкнено вихід телеметрії.
Увімкніть радіоконтролер (TX) і радіоприймач (RX), якщо вони вже зв’язані, при переміщенні стіків значення каналів також повинні змінюватися.
Якщо канали реагують неправильно, вам може знадобитися змінити “Channel Map”, зазвичай це має бути AETR1234 або TEAR1234.
Якщо канали не реагують на рухи стіків, ось як усунути проблему:
RX прив’язаний до TX? (ви бачите зелене світло на RX?)
RX правильно припаяний до FC?
Ви ввімкнули послідовний RX для правильного UART?
Ви вибрали правильний протокол RX?
Після того, як ви переконалися, що канали працюють правильно, перевірте середні та кінцеві точки перших 4 каналів (Pitch, Roll, Yaw, Throttle).
Середні точки повинні бути близько 1500 мкс, а кінцеві точки – близько 1000 мкс (мінімальне значення) та 2000 мкс (максимальне значення).
Ви можете відрегулювати кінцеві точки на вашому радіопередавачі або в конфігураторі Betaflight.
Після налаштування кінцевих точок переконайтеся, що ваш квадрокоптер не здригається при знятті з землі.
Режими
На вкладці “Modes” ви можете налаштувати різні режими польоту, такі як Acro, Angle, Horizon та Airmode.
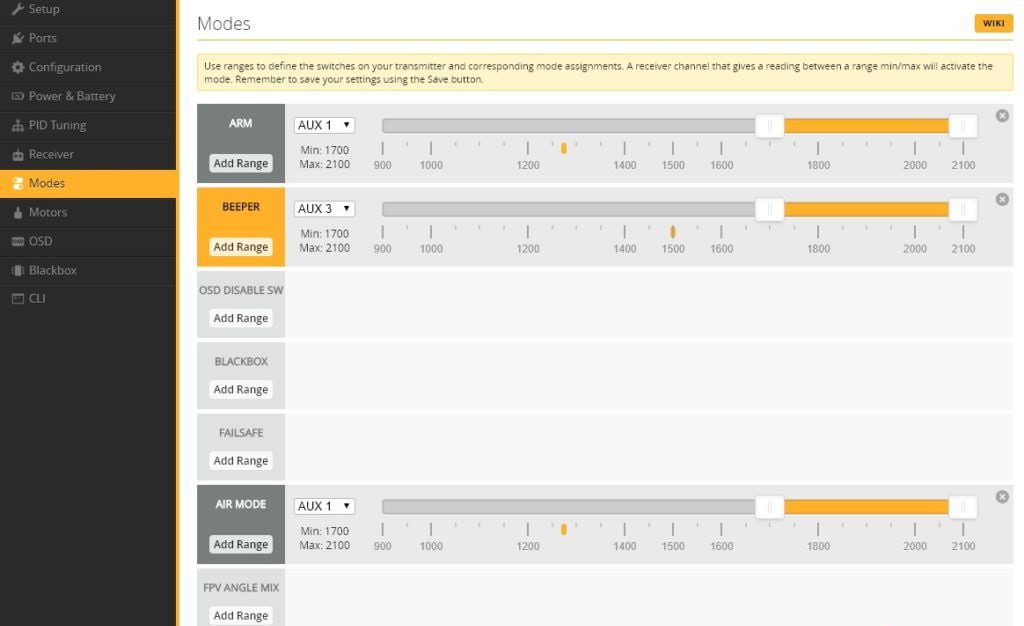
Ми рекомендуємо залишити Acro як є.
Для Angle та Horizon:
P-Gain, I-Gain, D-Gain: ці значення впливають на те, як швидко і плавно ваш дрон реагує на рухи стіків. Значення за замовчуванням зазвичай є хорошим початком, але ви можете експериментувати з ними, щоб знайти те, що вам підходить.
Maximum Angle: це максимальний кут нахилу, на який може нахилитися ваш дрон у цих режимах.
Bank Roll: це те, як швидко ваш дрон буде перекидатися вліво і вправо.
Airmode:
Airmode: увімкніть Airmode, якщо ви хочете, щоб ваш дрон був більш стійким у повітрі. Це корисно, коли ви летите на високій швидкості або виконуєте акробатичні трюки.
Airmode I-Gain: це значення впливає на те, як сильно ваш дрон буде намагатися вирівнятися, коли Airmode увімкнено.
Налаштуйте перемикач на вашому радіо для кожного режиму, який ви хочете використовувати.
Мотори
Вкладка “Motors” використовується для налаштування ESC і тестування двигунів. Для безпеки, будь ласка, переконайтеся, що ви зняли пропелери перед використанням вкладки “Motors”.

Єдине, що вам потрібно змінити тут – це ESC/Motor Protocol. Якщо ви використовуєте BLHeli_S або BLHeli_32 ESC, рекомендується використовувати DShot. Виберіть:
DShot600 для 8 кГц
DShot300 для 3.2кГц/ 4кГц
DShot150 для 1.6кГц / 2кГц
Ми рекомендуємо залишити опцію “MOTOR_STOP” вимкненою, інакше ви не зможете визначити, чи є ARM у вашого квадрокоптера . Решту параметрів можна залишити за замовчуванням.
Натисніть “Save and reboot”, а потім знову поверніться на вкладку “Двигун”.
Є кілька речей, які треба перевірити:
Чи можуть двигуни обертатися?
Чи двигуни розташовані у правильному порядку, як показано на верхній лівій схемі?
Чи обертаються вони у правильному напрямку, як показано на верхній лівій схемі?
Ось правильний порядок розташування та обертання двигунів:
мотор 1 ззаду праворуч
мотор 2 спереду праворуч
мотор 3 ззаду зліва
мотор 4 спереду зліва

Якщо розташування моторів невірне,ви можете виправити його, натиснувши кнопку “Reorder motors”.
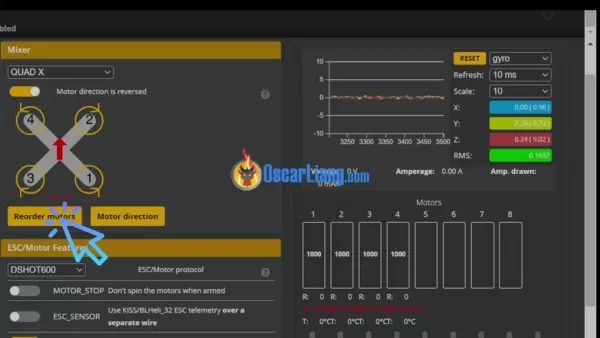
Тепер перевірте напрямок обертання двигуна, якщо він неправильний, ви можете змінити напрямок обертання, натиснувши “Motor direction”.

OSD
Тепер перейдіть до вкладки “OSD” на лівій панелі.
Якщо ви використовуєте системи DJI / Avatar / HDZero FPV, переконайтеся, що ви переключилися на формат відео HD, це дасть правильний розмір шрифту і екрану.
Для аналогової системи просто виберіть Auto (або PAL/NTSC, якщо ви знаєте тип вашої камери).

Ось так виглядає екранне меню у ваших окулярах.

Налаштувавши екранне меню, ви можете виводити на екран важливі дані про політ, такі як напруга і таймер.
Замість того, щоб розміщувати однакові елементи екранного меню для кожного квадрокоптера, можна просто копіювати і вставити наступний фрагмент коду в CLI, це набагато швидше. Це те, що зазвичай використовують на фрістайл квадрокоптері (без GPS):
set osd_vbat_pos = 2467
set osd_link_quality_pos = 2114
set osd_rssi_dbm_pos = 2082
set osd_tim_2_pos = 2486
set osd_throttle_pos = 2104
set osd_current_pos = 2135
set osd_mah_drawn_pos = 2403
set osd_warnings_pos = 14633
set osd_avg_cell_voltage_pos = 2435
save
Відеопередавач
Якщо ви використовуєте аналоговий відеопередавач і маєте намір змінювати канал і потужність в екранному меню, то вам слід налаштувати таблицю VTX. Це не стосується цифрових FPV-систем (DJI/HDZero/Avatar).
Існує 3 способи завантаження VTX-таблиць:
* виберіть попередньо встановлену таблицю VTX y вкладці “Presets”
* завантажити JSON-файл у вкладці “Video Transmitter”
* вставити фрагмент коду в CLI
Зазвичай ви зможете знайти JSON-файл таблиці VTX або фрагмент CLI для вашого конкретного VTX на сторінці відповідного продукту.
Експертний режим( Expert mode)
Увімкнувши «Expert mode» у верхній частині вікна, ви отримаєте доступ до додаткових вкладок на лівій панелі та додаткових розширених налаштувань. Однак зазвичай вам не потрібно торкатися жодного з цих налаштувань під час першого польоту.

Вимкнення звукового сигналу
Якщо ваш дрон продовжує пищати, коли підключений USB-кабель (при вимкненому радіо), це легко виправити, вимкнувши опцію “USB” в розділі “Beeper configuration” y вкладці “Configuration”.
Це все, що стосується базових налаштувань в Betaflight.
Перевірка безпеки перед першим польотом
Перед першим польотом на вашому вадрокоптері, будь ласка, спочатку перевірте функцію Fail Save. Коли ви втрачаєте радіозв’язок, за замовчуванням двигуни повинні просто зупинитися, і квадрокоптер повинен впасти на землю. Ви ж не хочете, щоб пропелери працювали без контролю, адже це може спричинити ще більше пошкоджень.
Отже, ось як перевірити функцію “Fale Save”.
По-перше, вийміть всі пропелери для безпеки. Підключіть батарею, увімкніть апаратуру і активуйте квадрокоптер, мотори повинні обертатися на низькій швидкості.
Щоб симулювати аварійний режим, просто вимкніть радіо, коли квадрокоптер ще активований.
PID-регулятор

Налаштування PID-регулятора може здатися складним, але це не так.
За замовчуванням значення PID зазвичай є хорошим початком.
Ви можете експериментувати з ними, щоб знайти те, що вам підходить, але рекомендується спочатку змінити лише один параметр за раз і подивитися, як він впливає на поведінку дрона.
P-Gain: це те, як швидко ваш дрон реагує на помилку.
I-Gain: це те, як сильно ваш дрон буде намагатися усунути помилку.
D-Gain: це те, як сильно ваш дрон буде намагатися запобігти виникненню помилок у майбутньому.
Якщо ваш дрон здригається, коли ви знімаєте його з землі, це може бути ознакою того, що P-Gain занадто високий.
Якщо ваш дрон не реагує на рухи стіків так, як ви хочете, спробуйте збільшити P-Gain.
Якщо ваш дрон коливається або літає нестабільно, спробуйте зменшити I-Gain.
D-Gain зазвичай використовується для тонкого налаштування.
Загалом, краще починати з низьких значень PID і поступово збільшувати їх, доки не знайдете те, що вам підходить.
CLI
CLI (Command Line Interface) – це потужний інструмент, який дозволяє вам глибоко налаштувати Betaflight.
Це не рекомендується для початківців, оскільки ви можете пошкодити свій дрон, якщо введете неправильну команду.
Якщо ви хочете використовувати CLI, рекомендується спочатку ознайомитися з документацією Betaflight.
Ось кілька ресурсів, які допоможуть вам розпочати роботу з Betaflight:
Офіційна документація Betaflight: https://betaflight.com/docs/wiki
Відеоуроки Betaflight: https://www.youtube.com/watch?v=udOHBCORSrE
Betaflight Discord: https://discord.betaflight.com/
Підсумок
Це лише основні налаштування, які вам потрібно знати для першого польоту. Ви можете дослідити інші налаштування Betaflight, коли будете готові.